Cloud Based Component Library
הצגנו כבר את פלטפורמת ALTIUM 365, הן בבלוגים והן בוובינרים שונים, כך שכיום בשוק הישראלי יותר מ-65% מהחברות עובדים כבר עם פלטפורמת הענן והמספרים ממשיכים לעלות.
במאמר שלפניכם נבדוק מדוע יותר ויותר חברות בוחרות לתכנון PCB בענן.

אלה הן הסיבות העיקריות בגינן יותר ויותר לקוחות עוברים לענן:
- שרידות המידע – כאשר המידע עולה לענן הוא נשמר ומגובה בשרתי Altium שמבוססים על שירותי האחסון של אמאזון (AWS) עם רמת האבטחה הגבוהה ביותר.
- ניהול המידע – פרוייקטים שנמצאים בשירות הענן של Altium נהנים מניהול גירסאות אוטומטי מהרמה הבסיסית עד השוואה בין גירסאות של קבצים ספציפיים.
- שיתוף ומעקב – שיתוף פרוייקטים וסכמאות מעולם לא היה קל יותר בעזרת Altium 365.
- נגישות – ניתן לצפות במידע מכל מכשיר בעל אינטרנט – סמארטפון, טאבלט וכו'.
- ECAD – MCAD- כשעובדים עם הפלטפורמה ניתן להשתמש בשירות הייחודי של שילוב תוכנות מכאניות עם Altium Designer ועבודה על אותם קבצים.
- SSOT – Single Source of Truth – כל המידע על הפרוייקט במקום אחד ללא שכפול של קבצים ותיקיות מסורבלות.
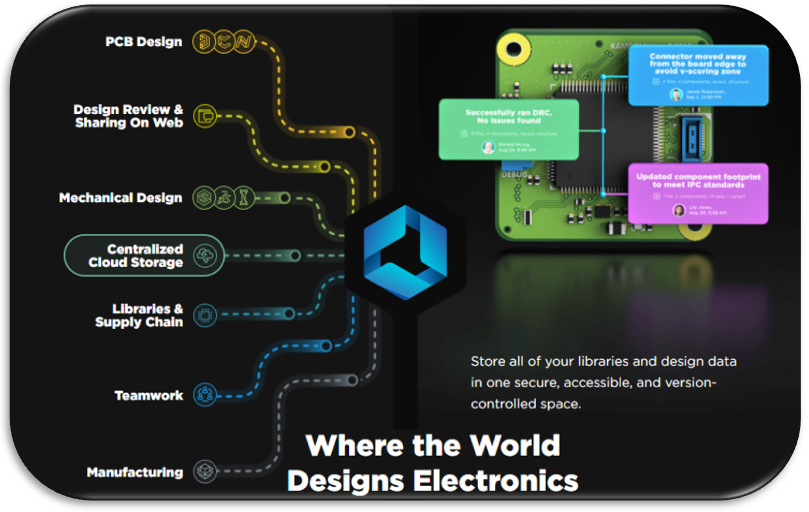
שירות נוסף שזמין בפלטפורמת Altium 365 הינו אחסון של ספריות הרכיבים שלכם בענן.
מה המשמעות?
אם כיום אתם עובדים באחת מהדרכים האלו:
- ספריית רכיבים מקומית שמתעדכנת באופן יידני
- ספריית Data Base משותפת
- ספריית רכיבים בודדת משותפת
אז הפתרון הבא יהיה מאוד מעניין עבורכם – העלאה וטעינה של ספריות הרכיבים שלכם בענן של Altium וגישה אליו מתוך Altium Designer עבור כל מהנדס.
במה התהליך כרוך? יצירת ספרייה אחת שכוללת את כל הרכיבים שלכם, והעלאה שלה אל הענן. מרגע שהרכיבים נמצאים בענן, הספרייה תהיה זמינה לכל מי שמחובר אל ה – Workspace של החברה. העבודה על הספרייה שקופה לכל שאר המשתמשים וניתן כמובן להגדיר משתמש אחד שמוגדר "ספרן" שלו יש יכולות עריכה של הספרייה.
ניהול הספרייה בענן נותן יכולות שלא קיימות בניהול ספרייה לוקאלית מקומית ומקנה אפשרויות ספרייה מתקדמות.
מעוניינים לשמוע עוד? צפו בוובינר שהעברתי בנושא מיגרציה של ספריות מ-Altium Designer אל Altium 365, בוובינר תוכלו לצפות במדריך שיכין אתכם וידריך אתכם כיצד להעלות את ספריות הרכיבים שלכם לענן ולחסוך זמן רב של ניהול ספריות מקומיות.
יש לכם שאלות? אני זמין לכל שאלה.
תודה רבה,
נתראה בפוסט הבא,
בן מימון