תכנון זירות התרחשות בתלת-ממד עבור סימולציות נהיגה אוטונומית


יצירה ועריכה של סביבות כבישים מפורטות ומורכבות עבור עולם הרכבים האוטונומיים ועבודה עם סימולטורים מתעשיית הרכב בשילוב פלטפורמת פיתוח גלובלית
לאורך השנים חברת MathWorks נתנה דגש רב עבור פתרונות לתעשיית הרכב ברחבי העולם. כחלק מהמשך הרחבת הפתרונות לתעשיית הרכב בכלל ולרכבים אוטונומיים בפרט, צרפה החברה בתחילת שנת 2020 את כלי ה- RoadRunner לארסנל הכלים שלה, פתרון המשתלב ומשלים את היכולות הקיימות.
האסוציאציה הראשונה שעולה אצל רוב האנשים כאשר הם שומעים את המילה RoadRunner (בעברית: קוקייה רצנית) הינה עוף מהיר ומתוחכם מבית האחים וורנר, אשר מצליח בכל פעם להערים ולהתחמק מפני זאב הערבות שמנסה לתפוס אותו, תוך כדי שהוא קורא "מיפ-מיפ"… אבל מהו בעצם כלי ה- RoadRunner?
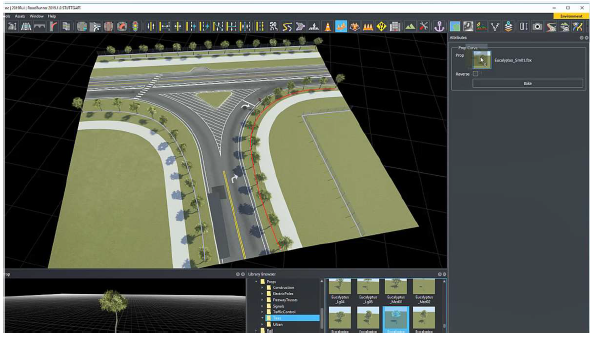
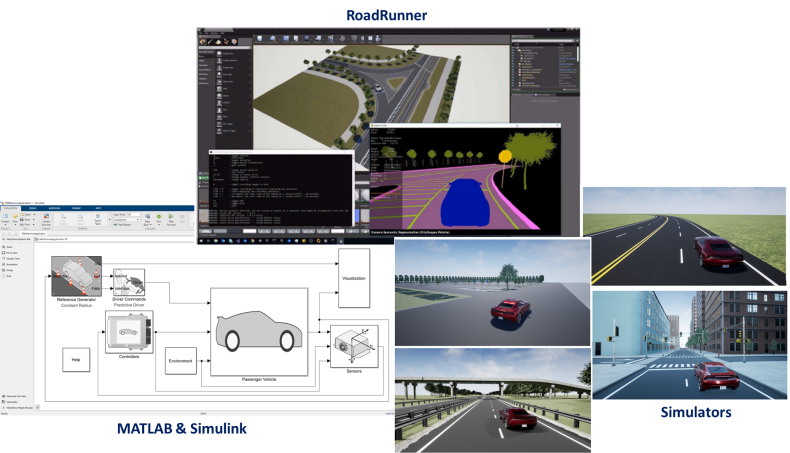
כלי ה- RoadRunner הינו סביבת עריכה אינטראקטיבית אשר מאפשרת לתכנן זירות התרחשות (Scenes) עבור הדמיה ובחינה של מערכות נהיגה אוטונומיות בתלת-ממד. באמצעות סביבת ה- RoadRunner ניתן לתכנן ולערוך כבישים, צמתים ומחלפים מסוגים שונים, להוסיף שלטים וסימנים לאורכם, למקם רמזורים ולהגדיר את התנהגותם, ואף לשלב מודלים בתלת-ממד של הסביבה (למשל בניינים).
כיום ישנן חברות רבות ומובילות ברחבי העולם אשר משתמשות ביכולות ה- RoadRunner כחלק משלבי הפיתוח. החברות הינן ממגוון רחב של תחומים – כמובן שישנן את יצרניות הרכב אשר מפתחות את הרכבים ורוצות לבחון אותם ברמות שונות ובשלבים שונים, ובנוסף ישנן חברות המפתחות מערכות עזר לנהיגה ואשר מוצריהן מתווספים לרכבים. חברות אלה מעוניינות גם הן לתכנן ולבצע הדמיה של הרכב, תוך שילוב המוצר שלהן ובחינתו בסביבה מורכבת הקרובה יותר למציאות.
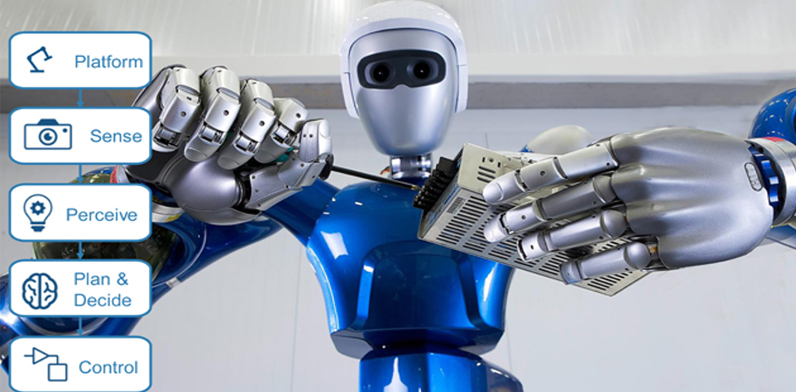
מנקודת מבט של חישה (Sensing), האפשרות לתכנן זירת התרחשות ברמת פירוט גבוהה ולערוך את הסביבה בה המערכת פועלת, מאפשרת לנו לבחון את התנהגות המערכת ואת שילוב החיישנים המחוברים אליה. כעת אנחנו יכולים לבדוק האם חיישן או מקבץ חיישנים מסוים אכן הבחין באובייקט על פי רמות מאפיינים שונות, למשל: סימון בולט על הכביש כנגד סימון דהוי, זיהוי שוליים, עצים, שלטים ועוד.
נקודת מבט נוספת הינה של תפיסה (Perception) ושילוב בינה מלאכותית למערכת שאנו מפתחים. בנוסף להגדרת זירת ההתרחשות באמצעות ה- RoadRunner, הפתרון מייצר עבורנו פילוח נתונים של הסביבה (semantic segmentation), כלומר, אנחנו מקבלים נתונים מתויגים אשר מסווגים ומשויכים לאובייקטים שהגדרנו בתוך זירת ההתרחשות.
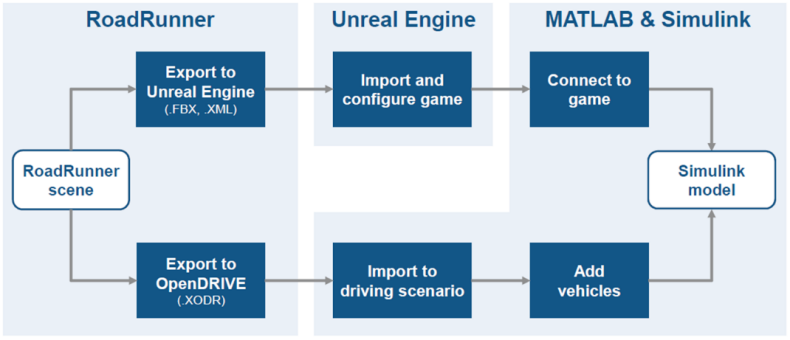
פתרון ה- RoadRunner מאפשר בין היתר ייבוא וייצוא של זירות התרחשות מפלטפורמות רבות. זירות ההתרחשות המתוכננות יכולות להשמר במספר פורמטים, להתממשק עם סביבת הפיתוח של MathWorks ולהיות מיוצאות לסימולטורים ומנועי משחק שונים כגון: OpenDRIVE, Filmbox, CARLA, Vires VTD, NVIDIA DRIVE Sim, LGSVL, Baidu Apollo, Unity, Unreal ועוד.
התהליך של תכנון זירת ההתרחשות באמצעות ה- RoadRunner, ייצוא לסימולטורים אחרים (כאשר כל סימולטור מתמחה בעולם תוכן משלו), ובחינה של המערכת המפותחת – מאפשר לקבוצות וצוותים שונים להשתמש בסימולטורים המתאימים להם. בפועל, אנחנו מתכננים את זירת ההתרחשות פעם אחת בלבד!
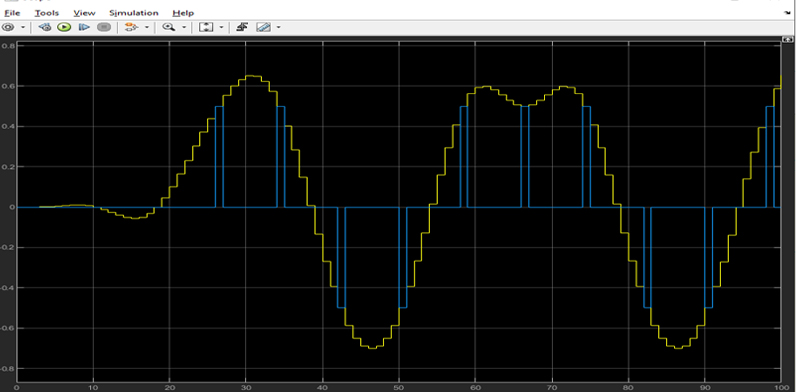
צורת העבודה עם ה- RoadRunner מאפשרת לנו מצד אחד להמשיך לעבוד על פיתוח מודל הרכב, התנהגותו, תתי המערכות שהוא מכיל והפיזיקה שהוא מיצג. כמו כן, אנו יכולים לפתח אלגוריתמים מעולמות של חישה, תפיסה, תכנון ובקרת מסלול ועוד ולשלבם עם המודל. ומצד שני, אנחנו יכולים כעת ליצר הרבה זירות התרחשות מפורטות במהירות, לערוך סביבות קיימות ולהתחיל לבחון את המערכת והאלגוריתמים אשר אנו מפתחים קרוב יותר למציאות!
ישנן שתי הרחבות המאפשרות לנו למנף את יכולות ה- RoadRunner:
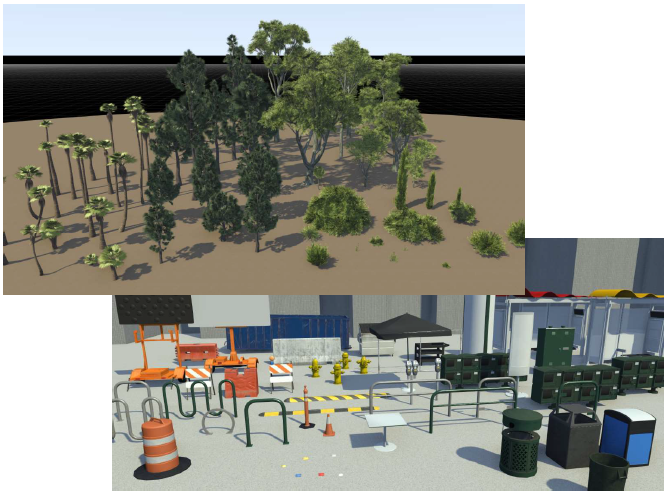
RoadRunner Asset Library – מאגר של מודלים בתלת-ממד להרחבת הגדרת זירות התרחישים. ההרחבה מכילה סימנים על גבי הכביש, שלטים לצדי הכביש, עצים, מחסומים ואף נזקים על הכביש (בורות, שמן וכו') – הרחבה זו זמינה החל מגרסת R2020a.
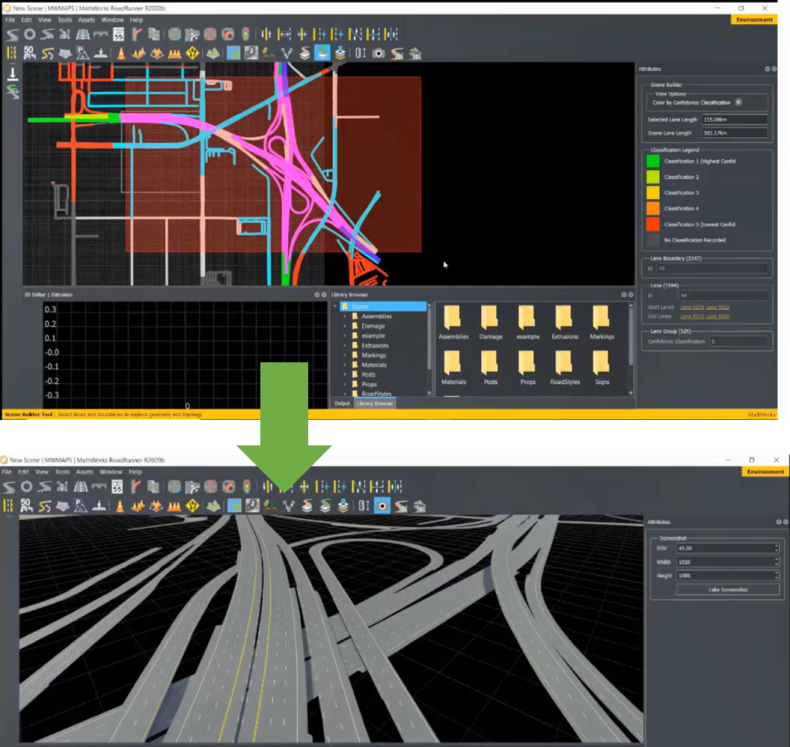
RoadRunner Scene Builder – כלי זה מאפשר לייבא ולשלב מודלים של כבישים בתלת-ממד מתוך פורמט של HERE HD Live Map. ניתן להציג ולערוך את מודלי הכבישים בסביבת ה- RoadRunner ולהוסיף עצים, רחובות, תמרורים ואלמנטים נוספים כחלק מזירת ההתרחשות – הרחבה זו זמינה החל מגרסת R2020b.
קישורים לעמודי הכלים:
סרטונים שימושיים:
- Creating Custom Junctions in RoadRunner
- RoadRunner Signal Editor
- Road Sign Creation with RoadRunner
- (RoadRunner Annotated Demonstration (No Sound