היתוך מידע מחיישנים ויכולות עקיבה עבור מערכות אוטונומיות

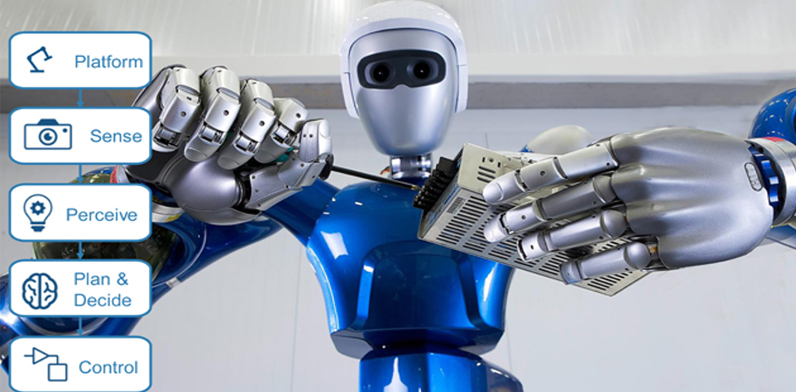
עולם המערכות האוטונומיות מורכב מתחומים רבים, בבסיס יכולות האוטונומיה נמצאים החיישנים. הינכם מוזמנים לגלות את עולם החישה אשר יש לחברת MathWorks להציע, להכיר יכולות מרכזיות ומה ניתן לעשות איתן הלאה.
מערכות חישה בעולם אוטונומי
כיום מערכות רבות הופכות להיות יותר ויותר חכמות ומורכבות. מערכות אלו יכולות להיות מעולמות תוכן רבים ומגוונים ולבצע משימות אשר שונות בתכלית באופיין ומטרתן. אחד הדברים המשותפים לכל המערכות הללו הינו שכולן מכילות חיישנים המאפשרים למערכת לאסוף מידע, להבין את המצב והסביבה בה היא נמצאת וכמובן להגיב בהתאם.
פתרון ה- Sensor Fusion and Tracking (SF&T) כולל אלגוריתמים עבור תכנון, הדמייה ובדיקת מערכות אשר מבצעות היתוך מידע ועקיבה ממספר חיישנים. ניתן למצוא שימוש ביכולות ה- SF&T במערכות רבות ומגוונות כמו מערכות פיקוח ומערכות אוטונומיות הפועלות בסביבות רבות: ספינות וצוללות בים, מטוסים, טילים ורחפנים באוויר, רכבים מסוגים שונים על יבשה (indoor/outdoor) ואף מערכות בחלל הפועלות מחוץ לאטמוספירת כדו"א.
חיישנים (Sensors)
פתרון ה- SF&T מאפשר לנו להגדיר מספר חיישנים מאותו הסוג וגם חיישנים מסוגים שונים. כמו כן, עבור כל חיישן ניתן להגדיר את התכונות הפנימיות עפ"י מפרט או דרישות, והן את התכונות החיצוניות, קרי, מיקום ואוריאנטציה של החיישן ביחס למערכת. סוגי החיישנים השונים הינם Radar, Lidar, Sonar, Infrared, IMU, INS ו- GPS. בנוסף, ישנם חיישנים נוספים לתעשיית הרכב כגון Camera, Vision-Based Object Detector, Lane Detector אשר הינם חלק מפתרון ה- Automated Driving (ADT).
מגוון יכולות חישה עבור מערכת בודדת
להלן דוגמא ליצירת אובייקט חיישן מסוג Lidar: באובייקט שנוצר ניתן להגדיר את התכונות החיצוניות כגון מיקום [X Y Z] ואוריאנטציה [Ψ θ φ] של החיישן ביחס למערכת עליה הוא נמצא. כמו כן, ניתן להגדיר תכונות פנימיות כגון מגבלת זוויות העבודה וההגבהה, רמת הדיוק שלהן, טווח עבודה מקסימלי של החיישן ועוד. את התכונות ניתן להגדיר ברגע יצירת אובייקט החיישן וגם לערוך אותן לאחר יצירתו.
תכונות אובייקט חיישן Lidar ב- MATLAB
היתוך מידע ועקיבה (Sensor Fusion & Tracking)
את המידע המתקבל מהחיישנים במערכת ניתן לעבד בנפרד ולהפיק תובנות בהתאם. אפשרות נוספת הינה ביצוע היתוך מידע של הנתונים באמצעות מנגנון בשם Multi-Object Tracker. מנגנון זה מקבל גילויים (detections) בצורה של מדידות ורעשים לאורך זמן ומחזיר מצבים (states) והקשר בינהם לאורך זמן (covariance), זיהוי המעקבים (ID), גיל/אורך המעקב, סטטוס (זמני/מאושר) ועוד.
מנגנון ה- Multi-Object Tracker מאתחל (Initialize), מוודא (Validate), מנבא (Predict), מתקן (Correct) ומוחק/מסיר (Remove) את המסלולים, קרי, מידע עבור האובייקטים הנעים. המנגנון מבצע עקיבה ע"י קבלת נתונים ממספר חיישנים והקצאתם למעקבים באמצעות מסננים (filters) עוקבים (trackers) מסוגים שונים ובהתאם לתרחיש בו המערכת צריכה לפעול – באופן זה אנחנו יכולים לשערך בצורה טובה יותר את האובייקטים שהמערכת מזהה ואת התנהגותם.
מנגנון היתוך מידע ועקיבה
ממשק גרפי
ניתן ליישם את היכולות שראינו הן בסביבת MATLAB והן בסביבת Simulink. אפשרות נוספת לעבודה הינה באמצעות ממשק גרפי בשם Tracking Scenario Designer App. ממשק זה מאפשר לנו לישם את תהליך העבודה בצורה נוחה וויזואלית ולבסוף לייצר ממנו קוד MATLAB.
באמצעות הממשק ניתן להגדיר את הפלטפורמה שלנו ומטרות מסביב (קרקעיות, אוויריות או ימיות), מהם המסלולים שכל פלטפורמה מבצעת ואלו חיישנים קיימים על כל פלטפורמה ותכונותיהם. לאחר הגדרת התרחיש, ניתן לבצע סימולציות ולייצר נתונים מהחיישנים השונים.
דוגמא לשימוש בממשק הגרפי ניתן למצוא בקישור: Tracking Scenario Designer.
דברי סיכום
כפי שראינו, לפתרון ה- Sensor Fusion and Tracking ישנן הרבה יכולות המאפשרות לנו להגדיר תרחיש של משימת המערכת, את סוגי החיישנים ותכונותיהם, ולבחון אלגוריתמים שונים של עקיבה.
בנוסף ליכולות אלו, ניתן להשתמש בנתוני החיישנים עבור פיתוח אלגוריתמים נוספים מעולם המערכות האוטונומיות:
תפיסה (Perception) – תהליך סיווג ופענוח המעניק משמעות לסביבה בה המערכת פועלת.
תכנון מסלול (Path planning) – מיפוי אזור העבודה ותכנון מסלול אופטימלי עבור תנועת המערכת.
בקרת מסלול (Path following) – פיקוח כי המערכת אכן פועלת עפ"י המסלול שתוכנן.
Stay Tuned… במהלך השנה ישוחררו תכנים נוספים בנושאים הנ"ל וכיצד הם משתלבים בעולם המערכות האוטונומיות.
אתם מוזמנים להוריד את ה- e-book שלנו בנושא מערכות אוטונומיות:
"פיתוח מערכות אוטונומיות באמצעות MATLAB ו-Simulink"