AI in PCB Design – The Current State

חברות בתחום האלקטרוניקה בוחנות איך אפשר להשתמש באלגוריתמים של למידת מכונה, אופטימיזציה ו- AI בתכנון ועריכת PCB כדי לסייע למתכננים ועורכים להתמודד עם אתגרים מורכבים יותר בזמן קצר יותר ובעלות נמוכה יותר, מה שישנה מהותית את פני התחום.
איפה אפשר להשתמש ב AI בתכנון PCB
בניית PCB כוללת מספר רב של משימות, החל מתכנון מעגל ועד עריכת ה- PCB והכנה לייצור. נכון לסוף שנת 2023, אין מערכת אחת שיכולה לטפל בכל משימות ההנדסה יחד.
CHATGPT וצ'ט-בוטים אחרים
כיוון ש CHATGPT הוא המוכר ביותר בכל הנוגע ל Generative AI. כדאי להתייחס לאפשרויות שיש לו ואיך אנשים משתמשים בו. לצ'טבוטים אחרים יש בעצם את אותן יכולות, כך שניתן לבצע את הפעולות האלו גם בפלטפורמות האלו.

אז מה הן האפשרויות?
בחירת רכיבים – הדיוק כאן משתנה מאוד אך התוספים מועילים לספק מידע ספציפי או DATASHEET. ישנם מיליוני רכיבים ושרשרת אספקה מונחית בינה מלאכותית עם נתונים מתוייגים שיכולה לעזור בבחירת הרכיבים הנכונים לפרוייקט.
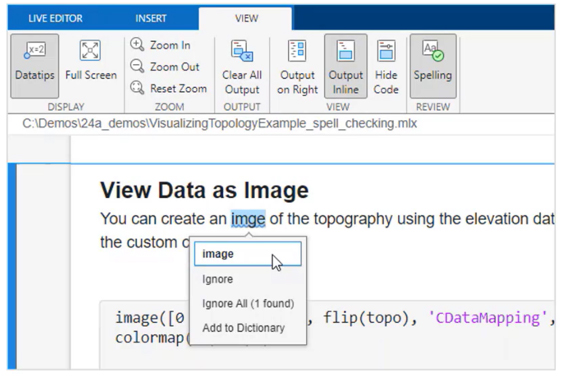
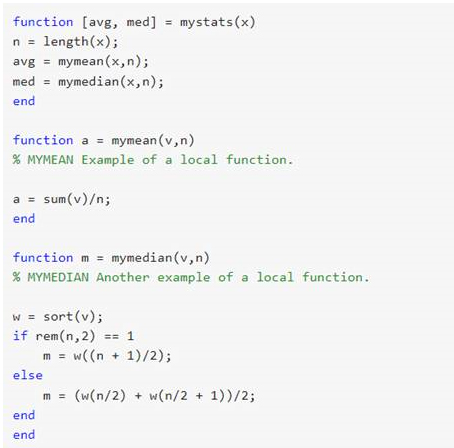
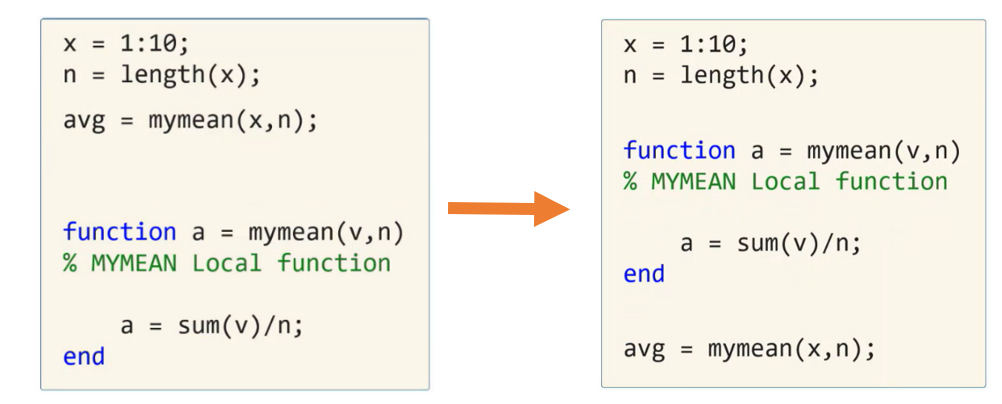
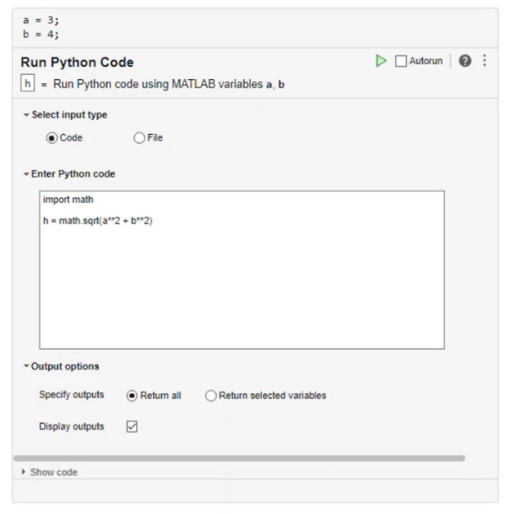
יצירת קוד או סקריפטים – כתיבת קוד או סקריפטים זו דרך קלאסית לשימוש ב CHATGPT כולל סקירפטים של Altium
בדיקות אוטומטיות – ארי מאפור הראה איך ניתן להשתמש ביכולות הגנרטיביות בchatgpt לבצע בדיקות אוטומטיות לחלקים Embedded, אפשר לקרוא עוד על זה כאן
חישובים בסיסיים – אם אין לכם את הנוסחאות שמורות או שלא שיננתם אותן, תמיד תוכלו להזין שאילתא לChatGPT לנוסחאות או לחישוב לדוגמה כדי להקל עליכם.
שאילתות בDATASHEET באמצעות plug-ins – חיפוש פיצ'רים באינטרנט מאפשר למשתמשים להעביר כתובות אתרים של DATASHEETS לצ'אטבוט וכך תוכלו להתשמש במידע מ DATASHEETS בפרומפטים אחרים.
כיום, הפלאגין לחיפוש באינטרנט זמין ב CHATGPT ותוספי החיפוש הדומים במערכות אחרות הם שינוי גדול במאפשר לכם להרחיב את היקף המידע שתוכלו לנתח. עבור מהנדסי אלקטרוניקה וPCB, המקרה הכי נפוץ שניתן להשתמש בו הוא הסעיף האחרון – ניתוחים בגליונות נתונים. השימוש ב CHATGPT מרחיב מאוד את היקף היכולות שלכם בפלטפורמה גנרטיבית.

יצירה מתוך דרישות מערכת
גישה נוספת מונחית בינה מלאכותית שמיישמת קוד לאוטומציה ב – front-end system-level design מגיעה מ JITX ונוקטת בגישה מבוססת קוד לפיתוח מעגלים ומאפשר לייצר פרוייקטים בפורמט הקבצים של Altium.
למרות שאינה מבוססת פרומפטים (prompt-based) היא משתמשת בבינה מלאכותית כדי לייצר את OUTPUTS ל CAD ולסייע למתכנן ה PCB בתהליך התכנון. עדיין יהיה בן -אדם בתהליך כיוון שצריך לבצע בדיקות ואימות של התוצאות מול דרישות המערכת.
למידע נוסף ניתן לצפות בפרק האחרון של הפודקאסט שלנו OnTrack עם דאנקן הלדיין מייסד וCTO של JITX .
בדיקה ויזואלית ומעקב
בעולם הייצור, מערכות בדיקה חדשניות בקו הייצור משתמשות בבינה מלאכותית כדי לבדוק מיקומי רכיבים לאורך שרשרת הייצור. בסופו של דבר, אם נדרש recall, אפשר למקד את זה מעגל ספציפי או למשטח רכיבים ממפעל ספציפי ולא לכל הפרוייקט.
כאן אפשר להשתמש ב Cybord.ai – מערכת המבוססת AI ועובדת על קווי הייצור כדי לזהות רכיבים וגם לשנות מיקומים אם יש חשד שרכיב מסויים לא תקין.
ברגע שמזהים בעייה עם מערכת מסוג זה, המשוב חייב להגיע ישירות לצוות התכנון כדי שניתן יהיה לעדכן את התכנון בגרסאות עתידיות. זהו מרכיב חיוני של בקרת איכות שכיום מבוצע ידנית לרוב. למידע נוסף, צפו בפרק האחרון של OnTrack עם ד"ר אייל ווייס מייסד וCTO של חברת Cybord.ai

תכנון PCB מונחה בינה מלאכותית לוקח שני מרכיבים: בניית מודלים ואופטימיזציה של תכנון. בניית מודל עוסקת ביצירת מודל מספרי המתייחס לתכונות בעריכת PCB (מיקום, רכיבים, ניתוב ועוד) עם מדדי ביצועים כמו:
- מפרטי תקינות חשמל
- מפרטי תקינות אות/סיגנל
- תפוקה/צריכת חשמל
- סוגי הממשקים
- תכנון שכבות
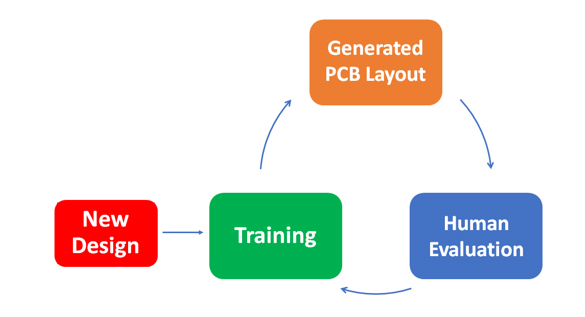
כפי שניתן לראות בדיאגרמה מעל, זהו התהליך שכיום לוקח חלק בכל נושא תכנון/עריכת PCB מבוסס AI:
- אימון מכונה
- ייצור נתוני PCB
- הערכה אנושית
ברגע שתכנון נוצר, עובר בדיקות ומתקבל, ניתן להוסיף אותו חזרה לסט האימונים כקלט חדש. תהליך הלמידה מאפשר למודל הגנרטיבי להתעדכן ולהתכווננן באופן רציף עם רוויזיות שהתקבלו.
כאשר שכלי התכנון וworkflows מתפתחים, אפשר להיות בטוחים שנהיה שם להדריך אתכם בעולם החדש של תכנון PCB מונחה בינה מלאכותית.
אני מזמין אתכם להיכנס לדף הלינקדין שלנו ולהתעדכן בפוסטים מעניינים, בנוסף לדף הוובינרים שלנו ביוטיוב שמתעדכן ברמה שבועית.
למידע נוסף צרו איתנו קשר,
תודה שקראתם ונתראה בבלוג הבא,
בן מימון