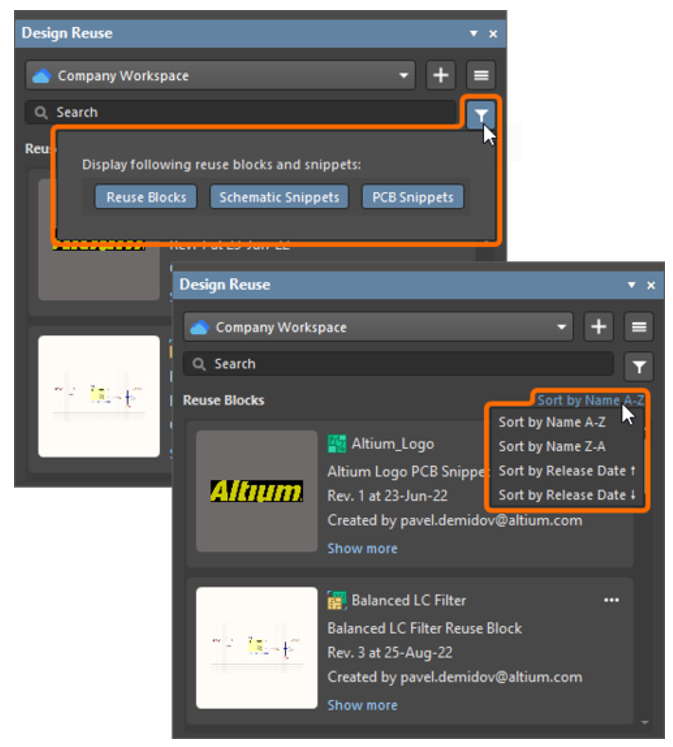
הכל מתחיל בהגדרות
לפני ייבוא הקבצים, תיבת ה 3D Interconnect הנמצאת בSystem Options > Import- יכולה להיות מסומנת או לא, לבחירתנו. כדי להבין את היתרונות והחסרונות, נדון באופציה הזו.
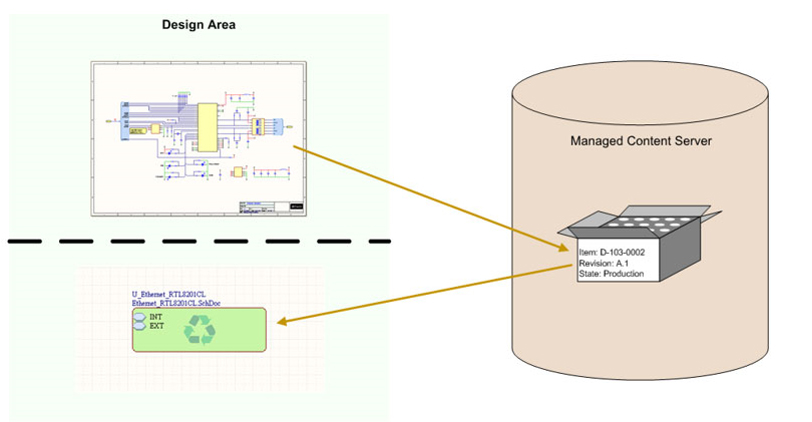
טכנולוגיית 3D Interconnect מאפשרת למשתמשים המקבלים קבצי CAD מיובאים מתוכנות נוספות לפתוח אותם בSOLIDWORKS ללא תרגום ושינויים נוספים, כך שהחומר, מספר החלק והתיאור נותרים כשהיו בתוכנה האחרת. כמו כן, הקובץ המיובא תחת הגדרה הזו מקושר לקובץ המקורי ולכן, הוא יתעדכן בהתאם לשינויים שמבוצעים עליו בתוכנה הנוספת.
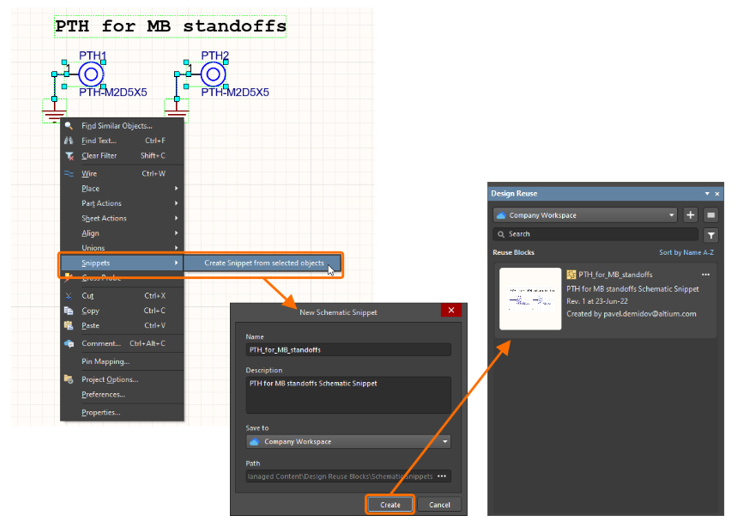
כאשר אנו מאפשרים את ה 3D Interconnect כמסומן לעיל, מופיע בעץ סמל מעט שונה מהמוכר. לחלק המיובא יהיה חץ ירוק קטן לצד הסמל של ההרכבה/החלק אליו אנו רגילים, הממחיש את הקישוריות לחלק המקורי שנוצר כאמור בתצורה אחרת. הוא נראה כך: 
בכדי לעדכן את החלק, ניתן ללחוץ קליק ימני על שם החלק ו Update Model.
כל עוד תיבת ה3D Interconnect מסומנת, אנו מפחיתים את הזמן הנדרש לתרגום הקבצים ומאפשרים שיתוף פעולה בין התוכנות השונות, אך בו בעת, אנו מאבדים את העצמאות לבצע שינויים בקובץ בעצמנו.
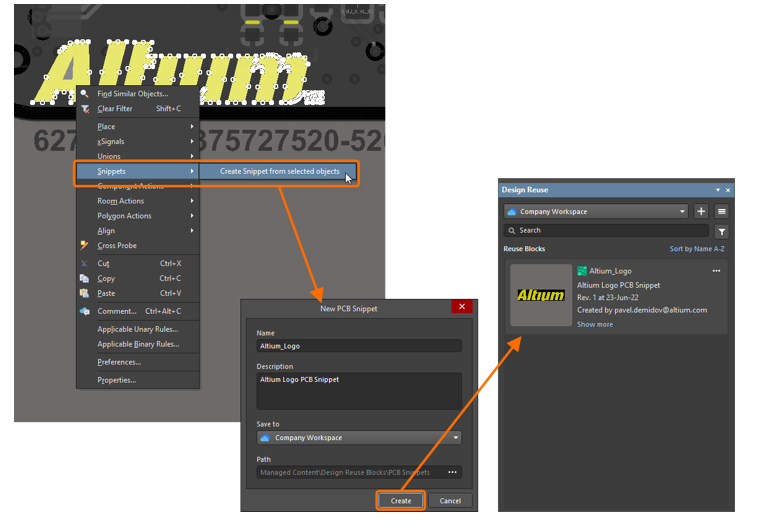
לכן, אם נוריד את האישור מתיבת ה 3D Interconnect, נקבל קבצים שבהם נוכל לבצע שינויים בגמישות בעזרת פיצ'רים הקיימים בתוכנה, וגם האייקון בעץ ייראה אחרת.
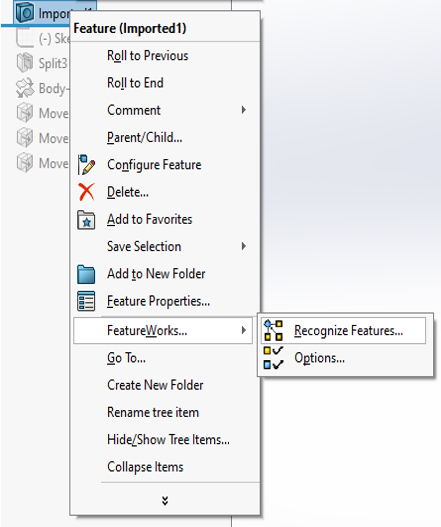
כעת, ישוב האייקון המוכר של הרכבה או של חלק, ותחתיו יהיה האייקון של גוף תחת השם  IMPORTED :
IMPORTED :
אנו צריכים להבין את הצורך מול הגורם משתף הפעולה, ולבחור מתי להשתמש ביבוא קובץ ללא ה 3D Interconnect ומתי עם. נזכור שללא השימוש בו, אנו מאפשרים שימוש בכלים רבים ואף ניתן לבצע מעקב אחר הליך הבנייה ושחזור פיצ'רים בחלקים מיובאים.
כיצד הסוליד יזהה את הפיצ'רים בחלקים מיובאים?
כידוע, לחלקים מיובאים אין עץ בנייה המאפשר שינויים.
למזלנו, ניתן לבצע הליך זיהוי פיצ'רים בעזרת קליק ימני על החלק ובחירה כמתואר:
SOLIDWORKS מבצע זיהוי אוטומטי של הגיאומטריה ומתרגם אותה לפיצ'רים. ככל שמדובר בגיאומטריה פשוטה יותר, כך יהיה קל ל SOLIDWORKS לעקוב אחר הליך הבנייה.
בנוסף, מתבצע תהליך של REPAIR למודל המתקן למשל, גיאומטריה חסרה.
עם אילו קבצים ניתן לעבוד?
בכדי לדעת באילו פורמטים ניתן לייצא או לייבא לתוך SOLIDWORKS ומחוצה לו, ניתן להיעזר בטבלה הבאה המרכזת את התוכנות ואת סיומות הקבצים המתאימות, והיא המעודכנת ביותר לגרסת 2023:
STEP 242
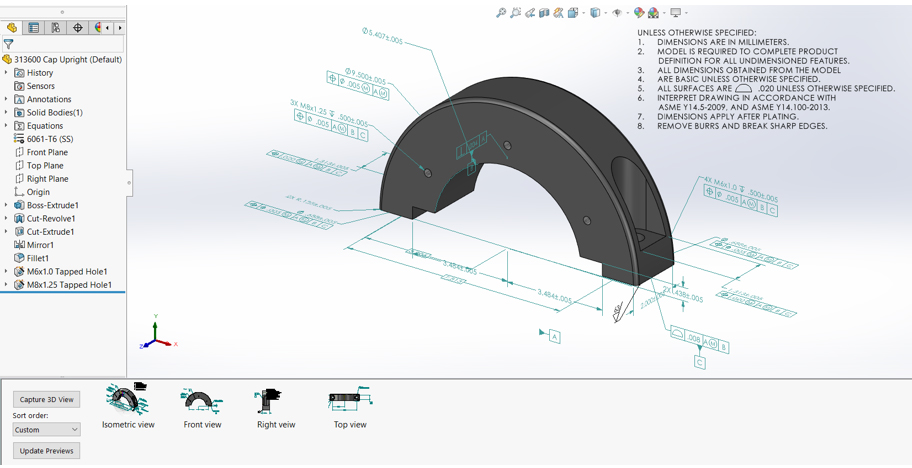
מדובר בפורמט חדש של STEP המאפשר לשמור לא רק את המידע הגיאומטרי, אלא את המידע הנדרש עבור הייצור (PMI), כמו מידות, טולרנסים ושאר אנוטציות. כדי לשמור קובץ מסוג STEP 242 נדרש רישיון MBD. מתי זה טוב?
בעבודה מול לקוח המשתמש ב eDrawing חינמי לדוגמא המקבל מאיתנו STEP 242 תהיה האפשרות לפתוח קובץ המכיל את כל המידות, אשר אינן חלק מהחבילה של STEP רגיל, או לשמור אותו כ 3D PDF כמתואר בתמונה למטה. בנוסף, ניתן להפיק PDF של שרטוט ולהוסיף את STEP 242 באופן מובנה כחלק מהליך השמירה, וכך מקבל הקובץ יכול לקבל מידע נוסף שיסייע להתחיל תהליך ייצור מדויק ויעיל יותר.
ב MBD ניתן לשמור PDF ולהוסיף את ה STEP 242 בקלות, תוך כדי תהליך השמירה המוכר.
כמו כן, יש תוכנות נוספות כמו SOLIDWORKS CAM שיכולות לקרוא את המידות ולכן קובץ מסוג זה חוסך לנו את הצורך בשרטוט, כשמדובר על תהליכי ייצור או עבור תהליך בקרת האיכות, בעזרת SOLIDWORKS INSPECTION.
באילו כלים נשתמש בכדי לשנות קובץ?
ל SOLIDWORKS כלי Direct Editing שמאפשרים שינויים מקומיים, גם על חלקים מיובאים:
לפירוט מלא על הכלים הנ"ל והאפשרויות השונות, ניתן לקרוא בבלוג: כלים לעריכה מהירה של חלקים מיובאים – Direct Editing
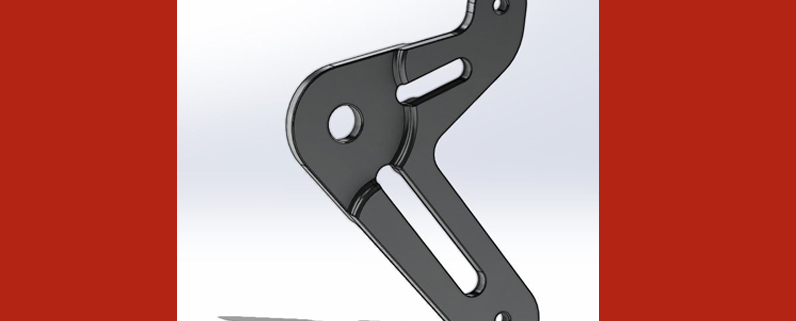
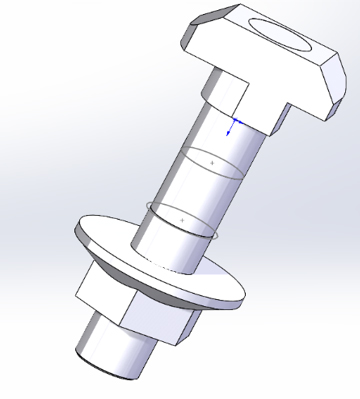
להלן דוגמה נוספת שנלקחה מקריאת שירות בתמיכה הטכנית במשרדי סיסטמטיקס. התקבל קובץ imported ונדרש לבצע בו שינויים. השינוי העיקרי והמהותי שנעסוק בו הוא הזזת החלק המסומן בצהוב כ 13.2 מ"מ.
בכדי לעשות זאת, אנו נבצע הפרדה ואז הזזה, בעזרת הפיצ'רים שנציג.
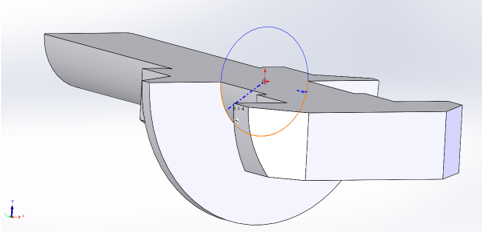
זהו אינו שלב הכרחי, אבל לצורך המחשה: ע"י לחיצה על section view, נראה שמדובר בגיאומטריה רציפה ולכן אנו צריכים להפריד את החלקים כדי שינועו אחד על פני השני.
ניצור סקיצה שנמצאת במישור ההזזה. אנו נבחר בסקיצה בצורת מעגל בגודל הפין, באופן הבא:
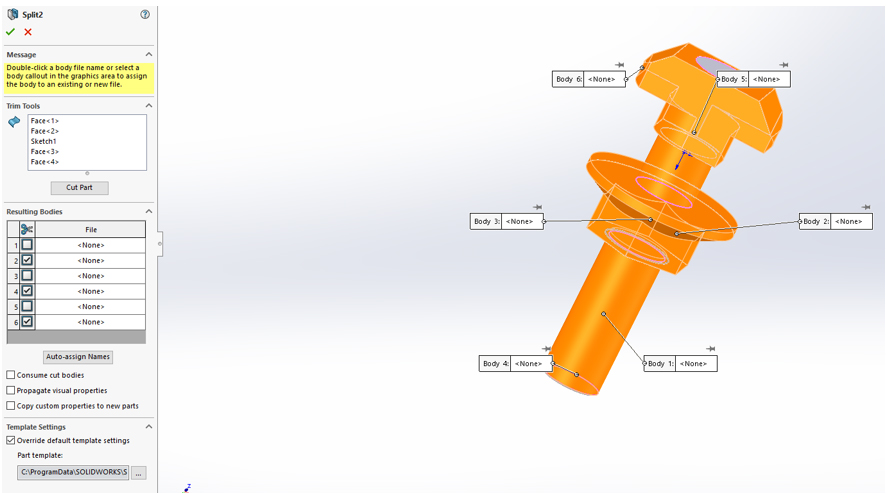
נשתמש בפקודה Split, בעזרתה נפריד את הגופים בכדי לשנות את גודלם. ניתן כמובן גם לאתר אותה משורת החיפוש:
עת יפתח החלון של הפיצ'ר, נלחץ על הפאות שדרכן נרצה שתיווצר ההפרדה, ואז נלחץ cut part.
בנוסף תתאפשר תיבה כמתואר בצילום שתיתן לנו אפשרויות לבצע את ההפרדה.
נשים לב שכדאי לבחור את החלקים שנמצאים באותו המישור כדי לבצע חיתוך ולקבל חלקים כמו שצריך.
מה שאני בחרתי (במעמד זה אציין שיש עוד המון אפשרויות):
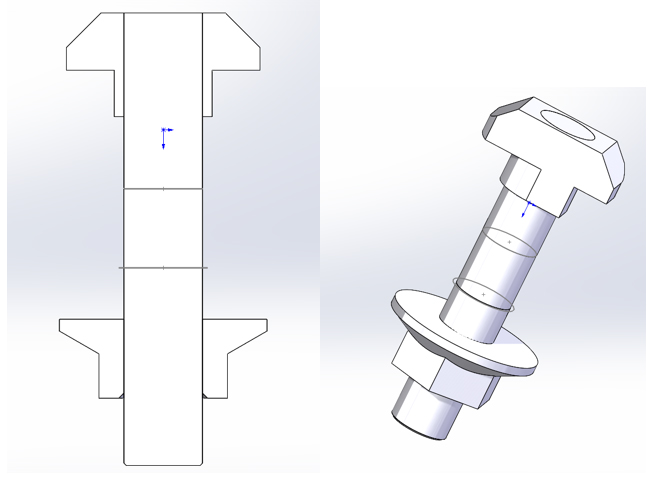
לאחר שביצענו את החיתוך כמו שצריך, ניתן לראות שקיבלנו גיאומטריה פרידה שלא כמו החלק שהתחלנו איתו:
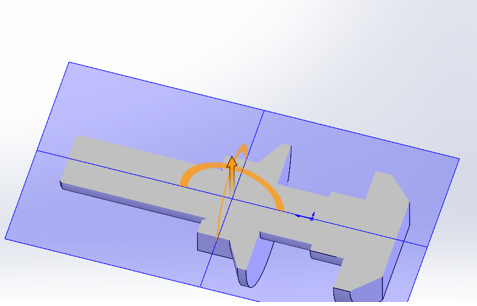
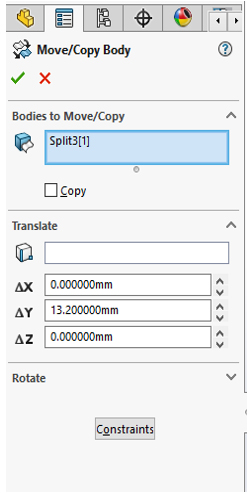
עכשיו נשתמש ב move body. בחלונית שתפתח, נבחר Translate/Rotate
נבחר את המרחק לפי הצירים שנמצאים ומוגדרים על הסקיצה:
והצלחנו להזיז את החלק המיובא למרות שלא הייתה לנו היסטוריית בנייה כלל!
זו הייתה דוגמא קטנה מחיי היום יום של מהנדסת, אבל בל נשכח שה-SOLIDWORKS מלא באופציות לשיפור, שינוי ותיקון קבצים, לכן האפשרויות אינן מוגבלות והשמיים הם הגבול.










{kind=link}