בדיקת תקינות כרטיס מסך בעבודה עם SOLIDWORKS
מהו כרטיס מסך?
כרטיס מסך (או כרטיס גרפי / Graphics Processing Unit) הוא רכיב עיקרי במחשב שתפקידו לבצע חישובים גרפיים והצגת התמונה הנדרשת על המסך. במחשבים מסוימים ישנם שני כרטיסי מסך – אחד בעל צריכת חשמל גבוהה וביצועים גבוהים לצד אחד חסכוני יותר שאינו מתאים ליישומי תיב"מ.
מה לי ולכרטיס המסך?
האופן בו נעשה שימוש בחומרה ובהגדרות תוכנה במחשב יכול להשפיע על תפקוד כרטיס המסך, ועל כן עלינו לוודא התאמה אופטימלית לצרכי העבודה שלנו. שימוש לא נכון בחומרה / הגדרות תוכנה עשוי להביא לירידה בביצועים בתוכנות תיב"מ, עד כדי בעיות גרפיות וקריסות.
אם אנו חושדים שיש בעיה עם כרטיס המסך, נעבוד לפי סדר הפעולות הבא:
- נוודא שכרטיס המסך נתמך על ידי SOLIDWORKS
- נבדוק ש-SOLIDWORKS עושה שימוש בכרטיס המסך הנכון
- נעדכן את דרייבר כרטיס המסך אם יש צורך
- נקודות נוספות הרלוונטיות למחשבים ניידים
נוודא שכרטיס המסך נתמך
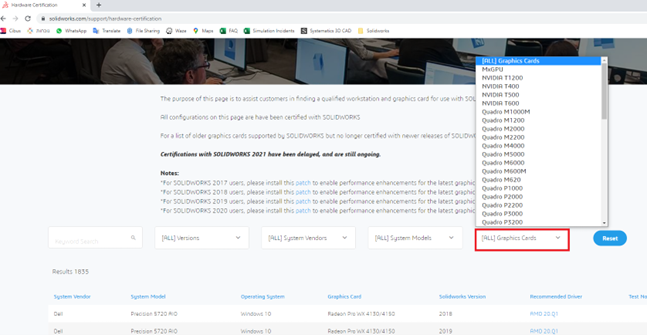
כדי לבדוק האם כרטיס המסך נתמך ע"י Solidworks, נחפש אותו ברשימה של הכרטיסים הנתמכים באתר https://www.solidworks.com/support/hardware-certification
את דגם כרטיס המסך שלנו נוכל למצוא ב-task manager (קיצור דרך Ctrl-Shift-Esc), performance
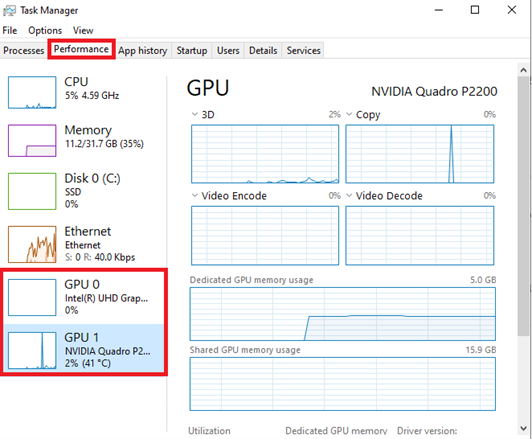
לעיתים במחשב יהיו שני כרטיסי מסך – אחד של intel (מובנה בלוח האם של המחשב), והשני של NVIDIA, ולעיתים רק NVIDIA. לעיתים רחוקות יותר נראה כרטיס מסך של AMD. כאן ניתן לבדוק את הדגם של כרטיס המסך.
כרטיס המסך אינו קיים ברשימה של הכרטיסים הנתמכים?
חלק מהפונקציונליות הגרפית של סולידוורקס לא תהיה זמינה ותיתכן עבודה איטית ובעיות גרפיות.
וידוא שימוש בכרטיס המסך
פותחים ב-SOLIDWORKS הרכבה תוך כדי הצגת מנהל המשימות ועוקבים אחר פעילות כרטיס המסך בזמן סיבוב מהיר של ההרכבה. נצפה לראות את האחוזים של כרטיס המסך הייעודי קופצים (גם אחוזים בודדים יעידו על שימוש בכרטיס המסך). אם כרטיס המסך נותר קבוע על 0% – סימן שהוא לא בשימוש.
תנאים שצריכים להתקיים לשימוש תקין בכרטיס המסך
המסכים צריכים להיות מחוברים לכרטיס המסך
המסכים צריכים להיות מחוברים ליציאות של כרטיס המסך. Layout נפוץ במחשבים מודרניים נראה כך:
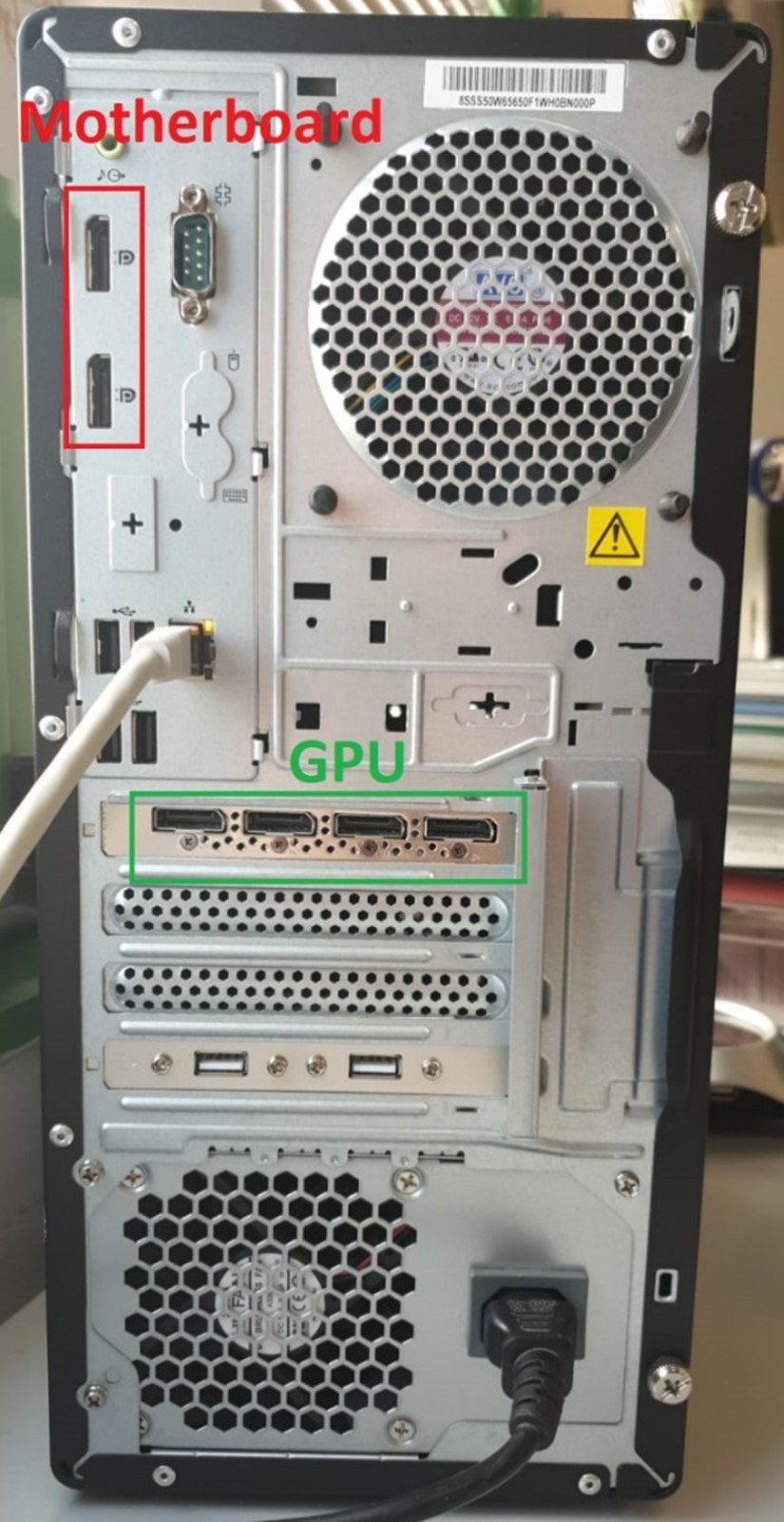
קורה שמחברים את המסכים ליציאות של לוח האם במקום ליציאות של כרטיס המסך. במקרה כזה כרטיס המסך לא לוקח חלק בעבודה. היציאות של כרטיס המסך תהיינה בשורה אחת ברוב המוחלט של המקרים (בכרטיסים חדשים ישנן ארבע כאלה) – וכך ניתן לזהות אותן.
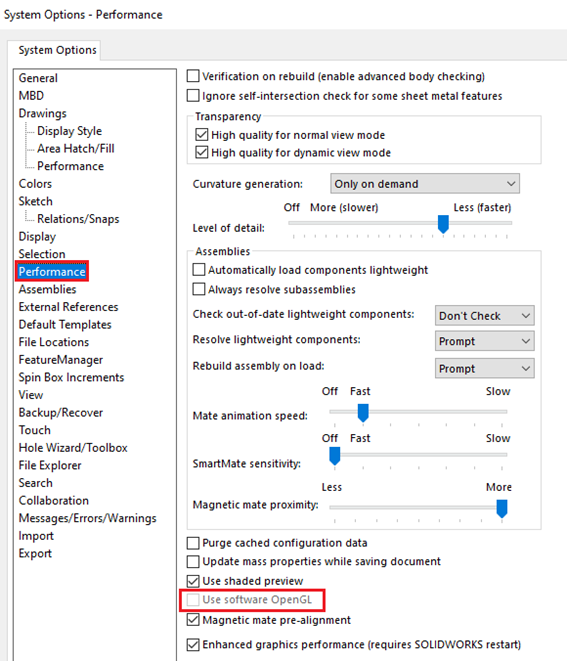
האופציה "Use Software OpenGL" לא מסומנת
כאשר האפשרות Use software OpenGL מסומנת (ראו מטה), התוכנה "עוקפת" את ספריית OpenGL שבכרטיס המסך (על החומרה) ומשתמשת בספרייה תוכנתית. מבחינות מסוימות, סימון האפשרות הזאת מבטל פונקציונאליות של כרטיס המסך. וודאו כי אפשרות זו אינה מסומנת. ניתן לשנות סימון זה רק כשכל המסמכים בסולידוורקס סגורים!
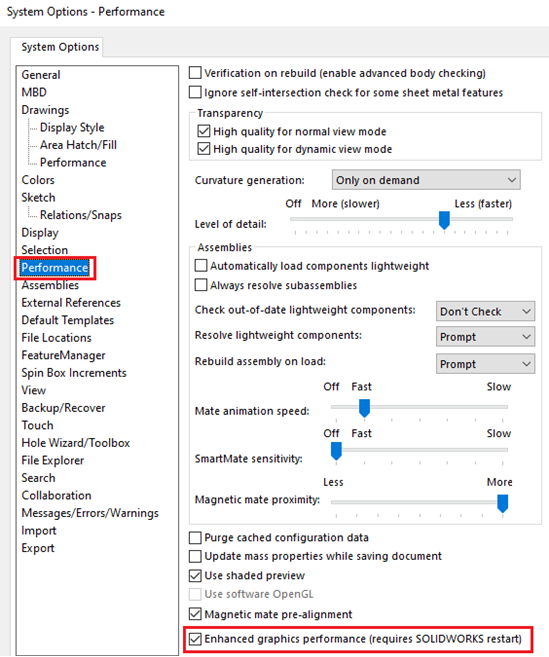
האופציה "Enhanced graphics performance" כבויה
למרות שמה, הגדרה זו גורמת לעיתים קרובות לבעיות גרפיות (תצוגה לא נכונה, איטיות וכו'). נכבה אותה ונעלה מחדש את SolidWorks כדי לראות אם המצב השתפר. מומלץ להשאיר הגדרה זו כבויה.
הגדרת כרטיס המסך לשימוש בסולידוורקס
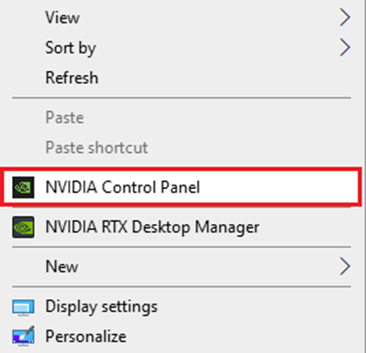
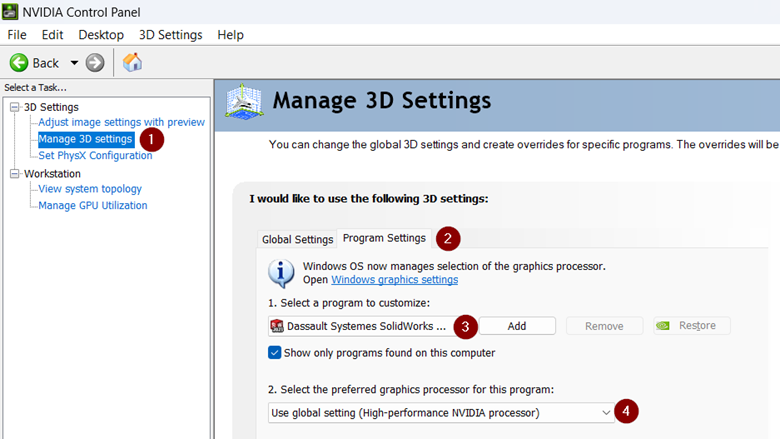
עבור מחשבים בהם יש שני כרטיסי מסך, מומלץ לוודא שכרטיס המסך של NVIDIA מוגדר ב-NVIDIA control panel, בלחיצה ימנית בשולחן העבודה:
יש לסמן את ההגדרה הבאה:
עדכון דרייבר כרטיס מסך
ככלל אצבע, נעדכן את דרייבר כרטיס המסך אם לא בוצע עדכון בחצי שנה האחרונה.
ניתן להוריד ולהתקין את הדרייבר המעודכן של כרטיס המסך שלנו דרך האתר של Nvidia:
https://www.nvidia.com/download/index.aspx
ביצועים במחשבים ניידים
שוני עיקרי בין עבודה על מחשב נייד לבין עבודה על מחשב נייח הוא ביכולת הקירור הפחותה של המחשב הנייד וניהול משאבים בעת עבודה על סוללה (במנותק מהמטען).
כברירת מחדל, ביצועים במחשב נייד ירדו כאשר ננתק את המטען מהסוללה.
כמו כן, הביצועים של רכיבי החומרה העיקריים (מעבד וכרטיס מסך) מוגבלים לפי טמפרטורת עבודה – כשהם מתחממים הביצועים שלהם מוגבלים כדי למנוע חימום יתר.
בעת עבודה על SOLIDWORKS השאירו את המחשב מחובר למטען, ודאגו ככל הניתן לקירור המחשב.
עד כאן לענייני כרטיס מסך בעבודה עם SOLIDWORKS.
יש לכם שאלה? צריכים הבהרה / המלצה / ייעוץ?
פנו אלינו בקריאת שירות בקישור הבא: https://systematics.formtitan.com/ftproject/service_request